นักวิจัยไทย สกสว.เจ๋ง ผลิต ‘มือเทียมกล’ ควบคุมผ่านสัญญาณไฟฟ้าในกล้ามเนื้อ เพื่อคนพิการ

นักวิจัย สกสว.เจ๋ง ผลิต ‘มือเทียมกล’ ควบคุมผ่านสัญญาณไฟฟ้าในกล้ามเนื้อ เพื่อคนพิการ
นักวิจัย สกสว.เจ๋ง ผลิต ‘มือเทียมกล’.. ควบคุมผ่านสัญญาณไฟฟ้าในกล้ามเนื้อ เพื่อคนพิการ สำนักงานคณะกรรมการส่งเสริมวิทยาศาสตร์ วิจัยและนวัตกรรม (สกสว.)
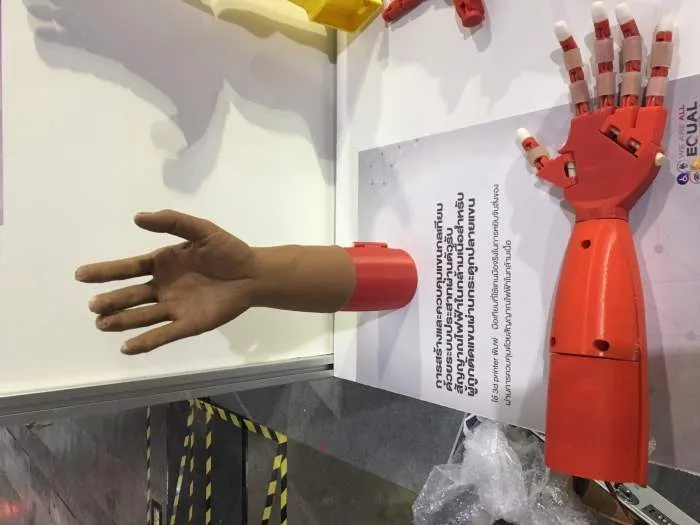
นักวิจัย สกสว. ใช้ไอเดียแขนกล ‘ไอรอนแมน’ พัฒนา ‘แพลตฟอร์มมือเทียมกลฯ’ เพื่อคนพิการ โดยมือเทียมกลขึ้นรูปจากพลาสติกด้วยเทคโนโลยีเครื่องพิมพ์ 3 มิติ ทำให้มีราคาถูก-น้ำหนักเบา-แข็งแรง
ส่วนการทำงานใช้เซ็นเซอร์ตรวจจับสัญญาณไฟฟ้าในกล้ามเนื้อซึ่งถูกสั่งการจากสมอง เพื่อออกคำสั่งชุดควบคุมให้มือเทียมกล ‘กำ-แบบมือ’ ตามที่ผู้ใช้ต้องการ เล็งต่อยอดสู่แพลตฟอร์มขาเทียมกลให้คนพิการขาใช้ในอนาคต

ประเทศไทยมีคนพิการ 3.7 ล้านคน คิดเป็นร้อยละ 5.5 ของประชากรทั้งหมด และเป็นคนพิการทางการเคลื่อนไหวสูงถึงร้อยละ 49.65 ในจำนวนนี้เป็นคนพิการแขนขาขาดกว่า 50,000 ราย และมีแนวโน้มเพิ่มขึ้นอย่างต่อเนื่อง ทว่าอุปกรณ์แขนขาเทียมสำหรับคนพิการแขนขาในปัจจุบันส่วนใหญ่ยังเป็นอวัยวะเทียมเพื่อเสริมสร้างภาพลักษณ์มากกว่าที่จะขยับใช้งานได้จริงเพื่ออำนวยความสะดวกในการใช้ชีวิต
ผศ.ดร.นพรัตน์ ธรรมวงษา อาจารย์สาขาวิชาวิศวกรรมอิเล็กทรอนิกส์และระบบอัตโนมัติ มหาวิทยาลัยราชภัฏอุดรธานี และทีมวิจัย พัฒนา ‘โครงการสร้างมือเทียมกลควบคุมผ่านตัวรับสัญญาณไฟฟ้าในกล้ามเนื้อ’ ภายใต้การสนับสนุนของสำนักงานคณะกรรมการส่งเสริมวิทยาศาสตร์ วิจัยและนวัตกรรม (สกสว.) ผศ.ดร.นพรัตน์ กล่าวว่า ปัจจุบันหลายสถาบันทั่วโลกมุ่งพัฒนามือเทียมกลที่ตอบสนองการเคลื่อนไหวแก่คนพิการ

แต่ยังมีราคาที่สูงมาก ยากต่อการเข้าถึง ทีมวิจัยจึงตั้งโจทย์ว่าทำอย่างไรที่จะช่วยพัฒนามือและขาเทียมกลที่สามารถขยับจับอุปกรณ์ต่างๆ ได้จริง เพื่อช่วยให้คนพิการใช้ชีวิตประจำวันด้วยตนเอง โดยในงานวิจัยครั้งนี้ได้พัฒนาต่อยอดจากผลงานของกลุ่มนักศึกษาสาขาวิชาวิศวกรรมอิเล็กทรอนิกส์และระบบอัตโนมัติ ที่ได้ทำชิ้นงานเกี่ยวกับ ‘ไอรอนแมน’ แขนกลยอดมนุษย์ในภาพยนตร์ฮอลลีวูด ซึ่งแขนกลเวอร์ชั่นแรกนี้ขึ้นรูปด้วยเครื่องพิมพ์ 3 มิติ และใช้การควบคุมแบบระบบไร้สาย แต่ยังไม่สามารถเชื่อมต่อกับการสั่งการของมนุษย์ได้ จึงสนใจต่อยอดให้เชื่อมต่อการสั่งการจากสัญญาณไฟฟ้าในกล้ามเนื้อของคนพิการได้จริง

การวิจัยมือเทียมกล ทีมวิจัยได้พัฒนา 2 ส่วน คือ
1. การสร้างแพลตฟอร์มสำหรับการพัฒนากายอุปกรณ์ในการพิมพ์มือเทียมกลจากเครื่องพิมพ์ 3 มิติ โดยทีมวิจัยออกแบบและใช้เครื่องพิมพ์ 3 มิติ พิมพ์มือเทียมกลให้มีความหลากหลายเหมาะกับคนพิการได้แล้ว 10 รูปแบบ (ออกแบบมือเทียมกลฯ ตั้งแต่ข้อมือ กลางมือ ตอข้อศอก และเหนือข้อศอก โดยแบ่งข้างซ้ายกับขวารวมเป็น 10 แบบ) จากเคสคนพิการ 12 ราย ซึ่งนำไปใช้กับคนพิการได้เลย และ
2. การสร้างแพลตฟอร์มสัญญาณควบคุมด้วยการใช้เซ็นเซอร์ตัววัดสัญญาณไฟฟ้าในกล้ามเนื้อของคนพิการ เป็นการสร้างแพลตฟอร์มใหม่ที่ทำหน้าที่ตรวจจับสัญญาณสั่งการจากสมอง
เป็นสัญญาณไฟฟ้าผ่านกล้ามเนื้อแขน “การทำงานของมือเทียมกล คือเมื่อคนพิการใส่มือเทียมกลที่ออกแบบไว้ เซ็นเซอร์ตรวจสัญญาณไฟฟ้าที่กล้ามเนื้อ หรือ Electromyography Muscle Sensor ซึ่งเชื่อมต่อกับมือเทียมกล จะทำการตรวจชุดสัญญาณไฟฟ้าที่ถูกสั่งการจากสมอง และนำมาสั่งการชุดควบคุมของมือเทียมกลให้ทำงาน เช่น ‘กำ-แบบ’ มือ ซึ่งหวังว่าจะเป็นประโยชน์ช่วยยกระดับคุณภาพชีวิตคนพิการแขนให้ดำเนินชีวิตได้ดีขึ้น” ผศ.ดร.นพรัตน์ กล่าวว่า ข้อจำกัดของมือเทียมกลตอนนี้คือ สามารถสั่งการได้ฟังก์ชั่นเดียวคือ การกำ-แบมือ

เนื่องจากกล้ามเนื้อของคนพิการแต่กำเนิดแทบไม่เคยถูกพัฒนามาก่อน หรือแม้แต่คนพิการอุบัติเหตุแขนขาดส่วนใหญ่ ไม่มีมัดกล้ามเนื้อที่จะทำให้เกิดสัญญาณไฟฟ้าที่หลากหลายได้ ตัวอย่างการพัฒนามือเทียมกลครั้งนี้ ทีมวิจัยได้ติดตั้งเซ็นเซอร์เพื่อตรวจจับสัญญาณไฟฟ้าในกล้ามเนื้อคนพิการถึง 8 ตัว แต่ตรวจจับสัญญาณได้เพียงจุดเดียวเท่านั้น จึงออกแบบฟังก์ชั่นการทำงานได้เพียงแบบเดียว ซึ่งทีมวิจัยเลือกเปลี่ยนสัญญาณไฟฟ้าให้สั่งการเป็นการกำหรือแบบมือ
เพื่อกำหรือวางสิ่งของ ซึ่งเป็นประโยชน์ในการใช้ชีวิตประจำวันที่สุด แต่หากในอนาคตคนพิการสามารถพัฒนากล้ามเนื้อให้ทำงานได้มากขึ้น เซ็นเซอร์ตรวจจับสัญญาณไฟฟ้าได้มากขึ้น ก็อาจจะพัฒนาให้สั่งการทำงานแยกนิ้วทั้ง 5 นิ้ว แยกการทำงานฟังก์ชั่นอื่นเหมือนคนปกติได้ เช่น การขยับนิ้ว เป็นต้น
นอกจากนี้แล้ว ทีมวิจัยยังได้พัฒนาชุดเซ็นเซอร์แบบเบ็ดเสร็จให้คนพิการใช้งานได้ง่ายขึ้น ทำให้สามารถสวมมือเทียมกลนี้ใส่แขนได้เลย โดยเสียบสวิตซ์กับมอเตอร์ก็ทำงานได้ทันที ไม่ต้องเขียนโค้ดอะไรเพิ่มเติม ช่วยให้นักกายอุปกรณ์ลดขั้นตอนที่ยุ่งยากในการต่ออุปกรณ์ สำหรับการพัฒนาต่อยอดมือเทียมกล ในอนาคตทีมวิจัยเตรียมออกแบบไมโครคอนโทรลเลอร์ให้เซ็นเซอร์และชุดควบคุมอยู่ด้วยกัน และออกแบบแพลตฟอร์มระบบการรู้จำว่ามือเทียมกลสำหรับคนพิการแขนต้องมีฟังก์ชั่นการทำงานอย่างไรบ้าง
ที่สำคัญทีมวิจัยยังมองไปถึงขั้นการพัฒนาปัญญาประดิษฐ์ หรือ AI มือเทียมกลเฉพาะบุคคลด้วย เนื่องจากรูปแบบมือเทียมกลกับรูปแบบของสัญญาณไฟฟ้าในกล้ามเนื้อของแต่ละบุคคลไม่เหมือนกัน” อย่างไรก็ดี สำหรับงานวิจัยในแพลตฟอร์มแรก คือการพิมพ์มือเทียมกลด้วยเครื่องพิมพ์ 3 มิติ ทีมวิจัยได้เริ่มขยายผลติดตั้งใช้งานจริงที่โรงพยาบาลสิรินธร จังหวัดขอนแก่น นอกจากนี้เตรียมวางแพลตฟอร์มให้แก่โรงพยาบาลสมเด็จพระบรมราชเทวี ณ ศรีราชา จังหวัดชลบุรี รวมทั้ง โรงพยาบาลค่ายประจักษ์ศิลปาคม จังหวัดอุดรธานี ด้วย

ผศ.ดร.นพรัตน์ กล่าวว่า เรามุ่งหวังช่วยเปลี่ยนมือเทียมแบบเดิม ซึ่งเป็นมือเทียมแบบแข็งๆ หรือขาของผู้พิการที่เป็นแบบเหล็กให้เป็นมือเทียมกลที่ออกแบบขึ้น ซึ่งเป็นวัสดุที่พิมพ์จากพลาสติกมีค่าใช้จ่ายประมาณ 1,000-2,000 บาท (ไม่รวมตัวชุดควบคุมที่สั่งการให้มือขยับได้) ใช้เวลาในการเปลี่ยนเพียง 1-2 วัน และยังปรับขนาดให้เหมาะสมกับผู้ใช้ได้
อีกทั้งหากคนพิการที่สนใจใส่เซ็นเซอร์ควบคุม ทีมวิจัยสามารถผลิตได้ในราคาไม่ถึงหมื่นบาท ซึ่งมีราคาถูกกว่าการนำเข้าจากต่างประเทศที่มีราคาหลักแสนบาท
“ไม่เพียงมือเทียมกล ตอนนี้ทีมวิจัยมองไปถึงการพัฒนาเซ็นเซอร์ให้ขาเทียมด้วย เพราะขณะนี้สามารถใช้เทคโนโลยีเครื่องพิมพ์ 3 มิติ ออกแบบพิมพ์เบ้าอวัยวะขาเทียม ให้มีน้ำหนักเบา แต่ยังคงความแข็งแรงทนทานได้เหมือนอวัยวะขาจริงที่ใช้งานได้ โดยขณะนี้อยู่ระหว่างการทดสอบเซ็นเซอร์และฟังก์ชั่นการทำงานของขาเทียมกล หวังว่าจะเป็นการต่อยอดนวัตกรรมที่จะช่วยคนพิการขาได้มากขึ้น
อ้างอิงจาก: สกสว.,kroobannok,YouTube

เขียนโดย Man
 หุ้นมีเป็นพันตัว...แล้วมือใหม่ควรเริ่มจากตัวไหน?
หุ้นมีเป็นพันตัว...แล้วมือใหม่ควรเริ่มจากตัวไหน? AI วิเคราะห์เลขท้าย 3 ตัวรางวัลที่ 1 งวดวันที่ 1 สิงหาคม 2569
AI วิเคราะห์เลขท้าย 3 ตัวรางวัลที่ 1 งวดวันที่ 1 สิงหาคม 2569 ต้นไม้ชนิดไหนปล่อยออกซิเจนมากที่สุดในโลก
ต้นไม้ชนิดไหนปล่อยออกซิเจนมากที่สุดในโลก รวม 5 ลางสังหรณ์และเหตุการณ์นำโชค ก่อนถูกรางวัลที่ 1 ใครมีอาการแบบนี้งวดนี้เตรียมตัวเป็นเศรษฐี
รวม 5 ลางสังหรณ์และเหตุการณ์นำโชค ก่อนถูกรางวัลที่ 1 ใครมีอาการแบบนี้งวดนี้เตรียมตัวเป็นเศรษฐี 5 เรื่องแปลกจากอดีต ที่ผู้คนทำเพื่อความสนุกและแสดงฐานะ
5 เรื่องแปลกจากอดีต ที่ผู้คนทำเพื่อความสนุกและแสดงฐานะ 10 นิสัยแปลกๆ ของ “คนฉลาดจริง” ที่คุณอาจจะมีแต่ไม่เคยรู้ตัว
10 นิสัยแปลกๆ ของ “คนฉลาดจริง” ที่คุณอาจจะมีแต่ไม่เคยรู้ตัว Bluetooth ส่งข้อมูลผ่านอากาศได้อย่างไร
Bluetooth ส่งข้อมูลผ่านอากาศได้อย่างไร 10 สัตว์ที่มีอวัยวะเพศยาวที่สุดในโลก อันดับหนึ่งยาวกว่าความสูงของคนทั้งตัว
10 สัตว์ที่มีอวัยวะเพศยาวที่สุดในโลก อันดับหนึ่งยาวกว่าความสูงของคนทั้งตัว 10 โรงแรมในตำนานของไทย ที่เคยโด่งดังแต่ปัจจุบันเหลือเพียงความทรงจำ
10 โรงแรมในตำนานของไทย ที่เคยโด่งดังแต่ปัจจุบันเหลือเพียงความทรงจำ แนวทางเลขเด็ด AI งวด 1 สิงหาคม 2569 รวมเลขเด่นทั้ง 2 ตัวและ 3 ตัว
แนวทางเลขเด็ด AI งวด 1 สิงหาคม 2569 รวมเลขเด่นทั้ง 2 ตัวและ 3 ตัว เส้นลายมือเปลี่ยนตามอายุได้ไหม? ไขคำตอบทั้งมุมวิทยาศาสตร์และศาสตร์ลายมือ
เส้นลายมือเปลี่ยนตามอายุได้ไหม? ไขคำตอบทั้งมุมวิทยาศาสตร์และศาสตร์ลายมือ มหัศจรรย์เกาะวัดกลางทะเลที่น้ำทะเลล้อมรอบ
มหัศจรรย์เกาะวัดกลางทะเลที่น้ำทะเลล้อมรอบ “ผู้หญิงบวชได้จริงหรือ?” เปิดมุมมองธรรมะ ประวัติศาสตร์ และความจริงในสังคมไทย5 เรื่องแปลกจากอดีต ที่ผู้คนทำเพื่อความสนุกและแสดงฐานะ
“ผู้หญิงบวชได้จริงหรือ?” เปิดมุมมองธรรมะ ประวัติศาสตร์ และความจริงในสังคมไทย5 เรื่องแปลกจากอดีต ที่ผู้คนทำเพื่อความสนุกและแสดงฐานะ พระกัมพูชาอ้างเป็นอดีตทหารเขมรแดง ประกาศจะยึดคืน 37 พื้นที่จากไทย
พระกัมพูชาอ้างเป็นอดีตทหารเขมรแดง ประกาศจะยึดคืน 37 พื้นที่จากไทย ในภูมิประเทศที่อากาศร้อนสุด ๆ ผู้คนเขาใช้ชีวิตกันอย่างไร?เส้นลายมือเปลี่ยนตามอายุได้ไหม? ไขคำตอบทั้งมุมวิทยาศาสตร์และศาสตร์ลายมือ
ในภูมิประเทศที่อากาศร้อนสุด ๆ ผู้คนเขาใช้ชีวิตกันอย่างไร?เส้นลายมือเปลี่ยนตามอายุได้ไหม? ไขคำตอบทั้งมุมวิทยาศาสตร์และศาสตร์ลายมือ เมื่อคุณแสดงอคติต่อศาสนาใด ศาสนานั้นกลับจะยิ่งเจริญรุ่งเรืองในประเทศของคุณ
เมื่อคุณแสดงอคติต่อศาสนาใด ศาสนานั้นกลับจะยิ่งเจริญรุ่งเรืองในประเทศของคุณ ยุโรปอากาศร้อนผิดปกติ ถ้าวันหนึ่งกลายเป็นเขตร้อนจะเกิดอะไรขึ้น
ยุโรปอากาศร้อนผิดปกติ ถ้าวันหนึ่งกลายเป็นเขตร้อนจะเกิดอะไรขึ้น รู้ไว้ใช่ว่า...แผนหลอกของกลุ่มมิจฉาชีพ "จีนเทา" ในวงการขายของออนไลน์ไข่เกิดก่อนไก่ หรือว่า ไก่เกิดก่อนไข่..วิทยาศาสตร์มีคำตอบ
รู้ไว้ใช่ว่า...แผนหลอกของกลุ่มมิจฉาชีพ "จีนเทา" ในวงการขายของออนไลน์ไข่เกิดก่อนไก่ หรือว่า ไก่เกิดก่อนไข่..วิทยาศาสตร์มีคำตอบ