MIT ตั้งเป้าสร้างสมองหุ่นยนต์ใหม่ที่ใส่ได้กับทุกตัว
วิธีฝึกหุ่นยนต์แบบใหม่สอนได้ไวกว่าเดิมมาก
นักวิจัยจาก MIT ได้พัฒนาวิธีการฝึกหุ่นยนต์ที่ลดเวลาและค่าใช้จ่ายในการฝึก พร้อมทั้งเพิ่มความสามารถในการปรับตัวให้เข้ากับงานและสภาพแวดล้อมใหม่ ๆ
วิธีการนี้เรียกว่า Heterogeneous Pretrained Transformers (HPT) ซึ่งรวมข้อมูลหลากหลายจากแหล่งต่าง ๆ เข้าด้วยกันเป็นระบบเดียว ทำให้หุ่นยนต์สามารถรับรู้และเข้าใจผ่านภาษาที่แบบจำลอง AI สร้างขึ้น โดยวิธีนี้แตกต่างจากการฝึกหุ่นยนต์แบบดั้งเดิมที่ต้องใช้ข้อมูลเฉพาะสำหรับหุ่นยนต์และภารกิจแต่ละตัวในสภาพแวดล้อมที่ควบคุมได้
ลีรุน หวัง นักศึกษาปริญญาโทสาขาวิศวกรรมไฟฟ้าและวิทยาการคอมพิวเตอร์แห่ง MIT และหัวหน้าทีมวิจัยกล่าวว่า แม้หลายคนมองว่าการฝึกหุ่นยนต์มีปัญหาที่การขาดแคลนข้อมูล แต่จริง ๆ แล้ว ความท้าทายที่ใหญ่กว่าคือการประยุกต์ใช้กับหลายโดเมน หลายรูปแบบ และฮาร์ดแวร์ที่หลากหลาย งานของทีมนี้จึงแสดงให้เห็นถึงวิธีการรวมและใช้ประโยชน์จากองค์ประกอบต่าง ๆ เหล่านี้อย่างมีประสิทธิภาพมากขึ้น
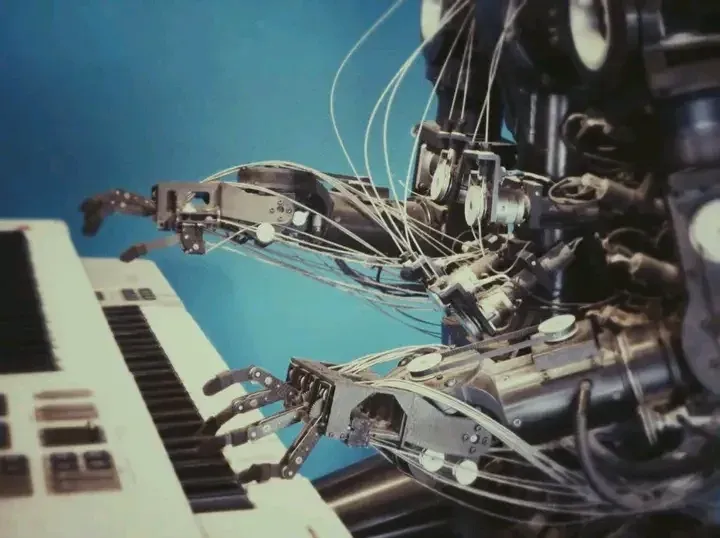
ทีมวิจัยได้พัฒนาโครงสร้างระบบใหม่ที่รวมประเภทข้อมูลหลายแบบ เช่น ภาพจากกล้อง คำสั่งภาษา และแผนที่ความลึก HPT ใช้แบบจำลองทรานส์ฟอร์มเมอร์ที่คล้ายกับแบบจำลองภาษาขั้นสูงในการประมวลผลข้อมูลทั้งทางสายตาและการรับรู้ตำแหน่งของหุ่นยนต์เอง
จากการทดสอบพบว่าระบบนี้มีผลลัพธ์ที่ยอดเยี่ยม โดยประสิทธิภาพดีกว่าวิธีการฝึกแบบดั้งเดิมถึง 20% ทั้งในสถานการณ์จำลองและการใช้งานจริง แม้หุ่นยนต์จะเจองานที่แตกต่างจากข้อมูลที่ใช้ฝึกก็ตาม
นักวิจัยได้รวบรวมชุดข้อมูลที่น่าทึ่งถึง 52 ชุดข้อมูล โดยมีเส้นทางการทำงานของหุ่นยนต์กว่า 200,000 เส้นทางครอบคลุม 4 หมวดหมู่ วิธีการนี้ช่วยให้หุ่นยนต์เรียนรู้จากประสบการณ์ที่หลากหลาย รวมถึงการสาธิตจากมนุษย์และการจำลองสถานการณ์
หนึ่งในนวัตกรรมสำคัญของระบบนี้คือการจัดการกับการรับรู้ตำแหน่งของหุ่นยนต์เอง (proprioception) ทีมออกแบบระบบให้ความสำคัญกับ proprioception ทำให้หุ่นยนต์สามารถเคลื่อนไหวได้อย่างซับซ้อนและยืดหยุ่นมากขึ้น
ในอนาคต ทีมวิจัยตั้งเป้าที่จะพัฒนา HPT ให้สามารถประมวลผลข้อมูลให้ดีขึ้น โดยวิสัยทัศน์สูงสุดของพวกเขาคือการสร้าง “สมองของหุ่นยนต์แบบสากล” ที่สามารถดาวน์โหลดและใช้งานกับหุ่นยนต์ใด ๆ ก็ได้โดยไม่ต้องผ่านการฝึกเพิ่ม
แม้ว่าโครงการนี้ยังอยู่ในช่วงเริ่มต้น ทีมยังคงมีความเชื่อมั่นว่าการพัฒนาต่อไปอาจนำไปสู่ความก้าวหน้าครั้งใหญ่ในนโยบายการทำงานของหุ่นยนต์

 โรงแรมดังเชียงใหม่ ประกาศปิดให้บริการถาวร
โรงแรมดังเชียงใหม่ ประกาศปิดให้บริการถาวร รู้หรือไม่ ปูอัดนั้น ทำมาจากเนื้อปูหรืออะไร ?
รู้หรือไม่ ปูอัดนั้น ทำมาจากเนื้อปูหรืออะไร ? เลขปฏิทินจีน งวด 1/3/68
เลขปฏิทินจีน งวด 1/3/68 “น้ำตาล ชลิตา โชว์ลุคเด็ด! สวมชุดพระ เครื่อง-ยันต์ โปรโมทรายการนางร้ายไทยแลนด์
“น้ำตาล ชลิตา โชว์ลุคเด็ด! สวมชุดพระ เครื่อง-ยันต์ โปรโมทรายการนางร้ายไทยแลนด์ “ไวรัลสุดน่ารัก! ผอ.สตรีศรีสุริโยทัย ใส่ชุดนักเรียนร้องเพลงอำลา ม.6”
“ไวรัลสุดน่ารัก! ผอ.สตรีศรีสุริโยทัย ใส่ชุดนักเรียนร้องเพลงอำลา ม.6” ลุงไปขอข้าวให้หมาในวัด ชาวบ้านบอกพระยังไม่ฉันเพล ให้รอก่อน ลุงไม่พอใจเดินไปตบหัวพระในโบสถ์
ลุงไปขอข้าวให้หมาในวัด ชาวบ้านบอกพระยังไม่ฉันเพล ให้รอก่อน ลุงไม่พอใจเดินไปตบหัวพระในโบสถ์ เงินดิจิทัล 10,000 บาท เฟส 3 มาแน่! ใครมีสิทธิ์ได้บ้าง? ลงทะเบียนที่ไหน? ✨
เงินดิจิทัล 10,000 บาท เฟส 3 มาแน่! ใครมีสิทธิ์ได้บ้าง? ลงทะเบียนที่ไหน? ✨ ตลกๆ ขำๆ ฮาๆ 🤣
ตลกๆ ขำๆ ฮาๆ 🤣 วิธีดูว่าเขาชอบเรารึปล่าวนะ? สังเกตุด้วยวิธีนี้ จะได้ไม่ต้องคิดไปเอง 🌬️
วิธีดูว่าเขาชอบเรารึปล่าวนะ? สังเกตุด้วยวิธีนี้ จะได้ไม่ต้องคิดไปเอง 🌬️ หญิงขี่จักรยาน แต่ กกน. เจ้ากรรมดันไปเกี่ยวเข้ากับอานนั่ง โดนเพื่อนแซวยับ สงสัยมันเกี่ยวได้ยังไง
หญิงขี่จักรยาน แต่ กกน. เจ้ากรรมดันไปเกี่ยวเข้ากับอานนั่ง โดนเพื่อนแซวยับ สงสัยมันเกี่ยวได้ยังไง รักต่างวัย! หนุ่มญี่ปุ่นวัย 32 วิวาห์แม่เพื่อน ที่อายุห่างกัน 21 ปี
รักต่างวัย! หนุ่มญี่ปุ่นวัย 32 วิวาห์แม่เพื่อน ที่อายุห่างกัน 21 ปี คอนแทคเลนส์หายไป 5 ชิ้นในตาของหญิงสาว
คอนแทคเลนส์หายไป 5 ชิ้นในตาของหญิงสาว เพจ "อีซ้อขยี้ข่าว" โดนแล้ว! "ปู มัณฑทนา" แจ้งความเอาผิดข้อหาหมิ่นประมาท
เพจ "อีซ้อขยี้ข่าว" โดนแล้ว! "ปู มัณฑทนา" แจ้งความเอาผิดข้อหาหมิ่นประมาท ละครคุณธรรม อาจารย์น้องหญิง ผู้ลงมาจุติ เพื่อกอบกู้โลกให้สงบสุข
ละครคุณธรรม อาจารย์น้องหญิง ผู้ลงมาจุติ เพื่อกอบกู้โลกให้สงบสุข


